The theme refers to the subject of unconventional automatic equipment, with ultra-precise linear and angular motion and positioning. The purpose of the project is to bring important contributions to the knowledge of multi-articulated systems, with high levels of mobility and control, highly reliable, for the construction of industrial robots or electric-hydraulic mechanical arms. The novelty, interdisciplinary aspect and the complexity of the proposed solutions are given by the elaboration of innovative algorithms for motion modelling, followed by the design of multi-articulated systems for independent 3D motion, and the construction of a multi-articulated system prototype, for predefined precise positioning robots. The output will raise the automation level of some specialized activities with high industrial impact (articulated mechanical arms for intervention in hazardous areas, for constructions and/or manipulating loads in difficult access areas, other intersectorial technologies etc.).
The present multi-articulated mechanisms have complicated structures and systems to drive and transmit the motion, resulting in disadvantages such as the high costs, low performance level and reduced reliability. The multi-articulated system includes the following substructures: the multiarticulated mechanism achieved by several serial joints, the control system, the hydraulic aggregate and the control hydraulic box. The spatial trajectories are achieved by a new 4th class spherical coupling that allows the application of a new motion driving system – a patentable concept. The new multi-articulated system has an increased rigidity, and the clearance in the motion drive system is totally eliminated, fact that facilitates the achievement of a high positioning precision.
The main scope of research is to establish new methods to obtain positioning accuracy and to reduce the trajectory error. The structure of the new multi-articulated system is much more simplified and provides an improved versatility, reducing thus the production costs. The activities are adequately foreseen and include:
- the analysis of the positioning precision and of trajectory error and the elaboration of an idea diagram that shall emphasize the innovating solutions for the proposed multi-articulated systems;
- laboratory research on the design of a cinematic joint and the adjacent positioning system, applicable to the proposed multi-articulated systems;
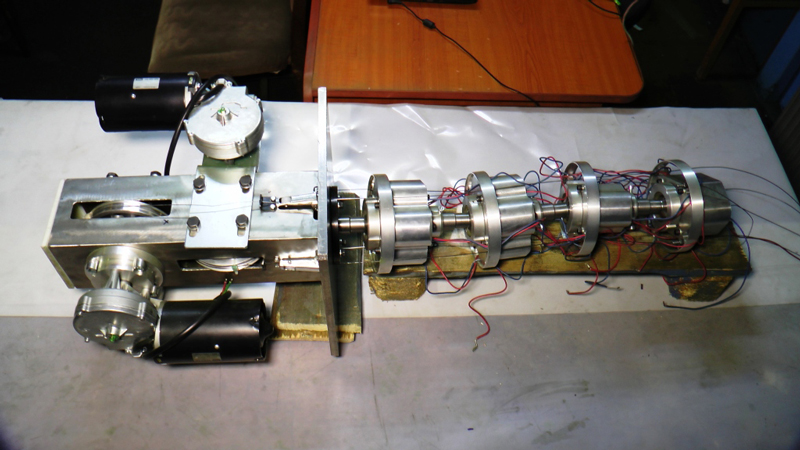
- design, production and testing a multiarticulated system prototype, that should be programmable, formed by: the multi-articulated device, the control system and the hydraulic installation;
- social-technical-economic analysis and the elaboration of the implementation and technological transfer solutions by public-private partnership, with the prospective of opening new implementation directions and new applications with the support of SME partners and TEHNOPOLIS IT & Technological Park Iasi (for building, medical, aerospace and industrial robotics).
All involved partners demonstrated a significant research activity in the field of high precision technologies and devices, the consortium including as end-uses traditional manufacturers of precision mechanical devices and equipment.